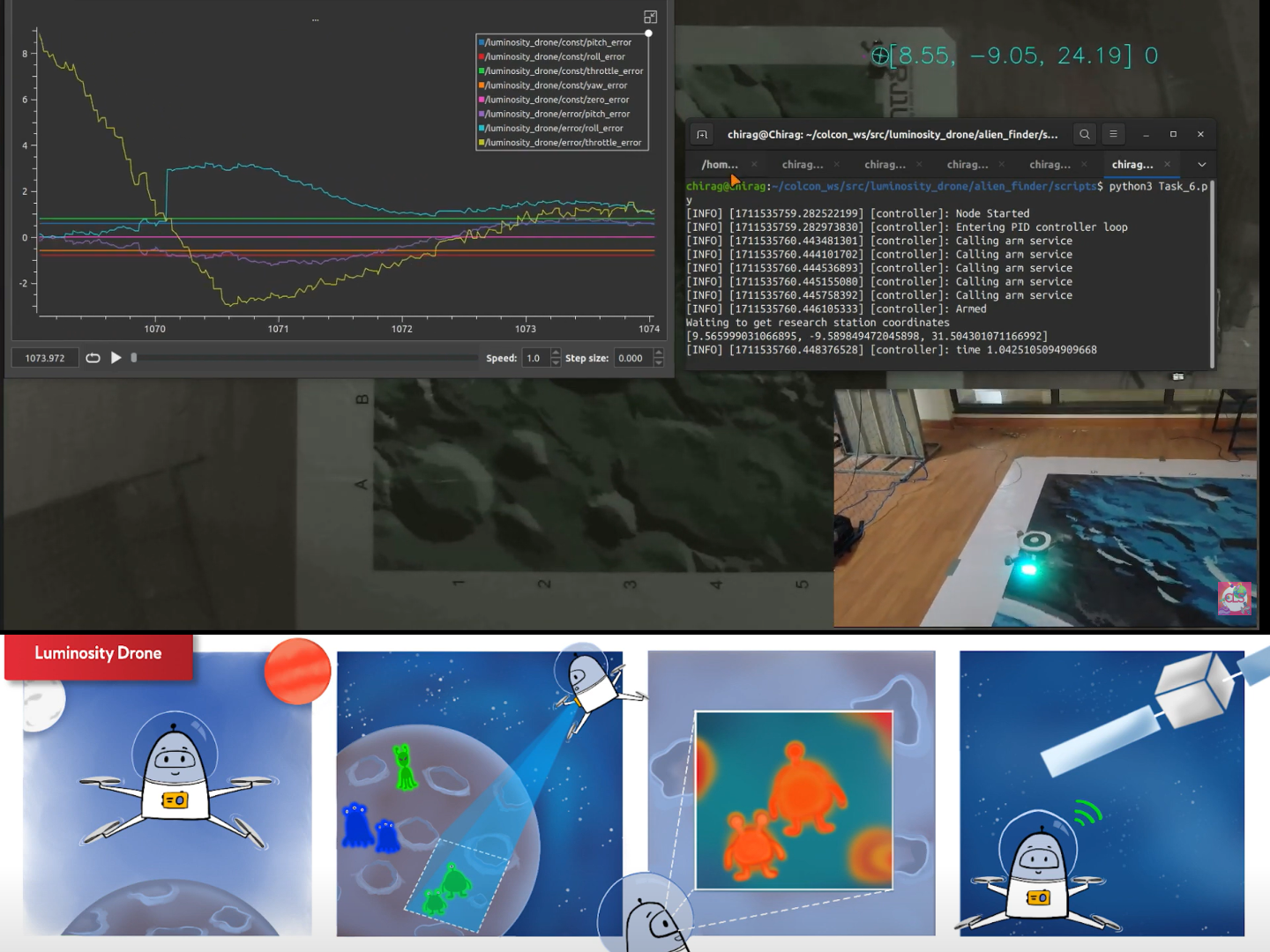
The "Luminosity Drone" problem statement required developing an autonomous drone capable of detecting and localizing specific organisms marked with IR LEDs within a defined environment. The challenge involved integrating ROS and ROS2, computer vision, and robust navigation algorithms to achieve accurate species detection and mapping.
'Luminosity drone', an extra-terrestrial life detector drone
Introduction
The "Luminosity Drone" project was undertaken as part of the E-Yantra Robotics Competition (E-YRC) conducted by IIT Bombay. This year-long challenge pushed our team—comprising me(Team Lead), Sudhakar Venkatachalam, and Chaitali Karekar—to develop a sophisticated autonomous drone system designed to detect, localize, and map specific organisms within a controlled environment. The problem statement required the drone to identify organisms marked with infrared (IR) LEDs and determine their global coordinates with high precision. To tackle this challenge, we focused on building a robust system that combined simulation, hardware development, and advanced programming techniques. Our drone was equipped with both ROS 1 and ROS 2, facilitating seamless control and communication across various components. The integration of ROS allowed us to manage the complexity of the system, enabling efficient sensor data processing, motor control, and inter-process communication. Central to our approach was the implementation of a versatile search algorithm. This algorithm was designed to ensure that the drone would thoroughly search the entire arena, regardless of its initial starting position, and then return to the exact location for landing. With simple adjustments to a few variables, the algorithm could be adapted to any map dimension, allowing the drone to search at desired altitudes and speeds. The drone's control system relied on three PID loops to manage throttle, pitch, and roll, providing stable and responsive flight control. All these functions, including the organism detection process, were executed within a single codebase running at a frequency of 30 Hz, ensuring real-time performance and accuracy. For organism detection, we utilized an onboard camera in conjunction with filters to identify the specific IR LEDs representing the organisms. The camera fed real-time image data into computer vision algorithms, which filtered out noise and accurately detected the organisms, enabling the drone to track and localize them within the arena. Throughout the competition, our team faced numerous technical and logistical challenges. Developing a fully autonomous drone required meticulous planning, extensive testing, and iterative problem-solving. The year-long effort was both exhausting and exhilarating, pushing us to apply our knowledge in robotics, embedded systems, and computer vision. Unfortunately, a mishap during the final stages of the competition resulted in damage to our drone, preventing us from submitting the last task. Despite this setback, we were proud of the progress we made and the skills we developed along the way. Our work on the Luminosity Drone project not only placed us among the top 20 teams in the competition but also provided us with invaluable hands-on experience in real-world robotics applications. The Luminosity Drone project was an intense and rewarding experience that significantly enhanced our expertise in robotics and autonomous systems. While we faced challenges and setbacks, the journey taught us the importance of resilience, teamwork, and innovative problem-solving. The knowledge and skills we gained from this project will undoubtedly serve as a strong foundation for our future endeavors in the field of robotics.