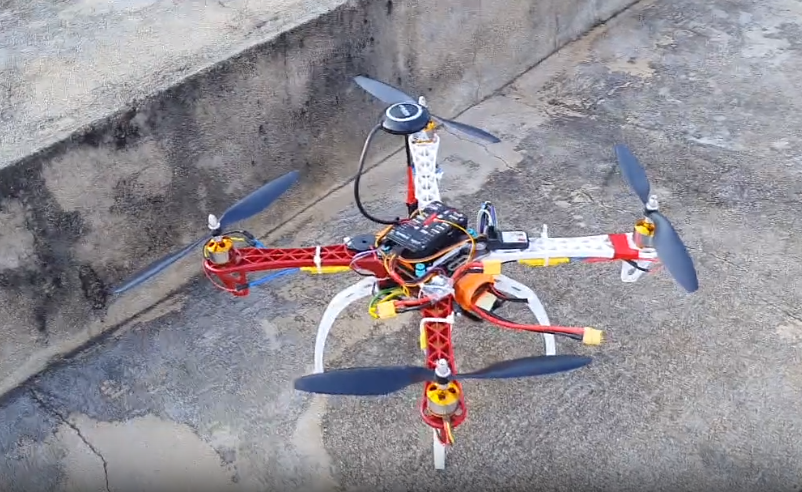
This project was the first time we were able to use Pixhawk as FCU for our quadcopter.
First Pixhawk Drone
Introduction
This project was first time we used pixhawk as FCU for our drone. Not only that, but we made a PPM encoder using Arduino as we had only PWM transmitter and receiver and we also made a make-shift test bench to check the stability of drone.