We made an RC car for the event, RC-Escapade, conducted by the Robotics Club of our institute, Techmaniacs, under the techno-cultural fest, Tirutsava of IIT Tirupati
RC Race Car
Introduction
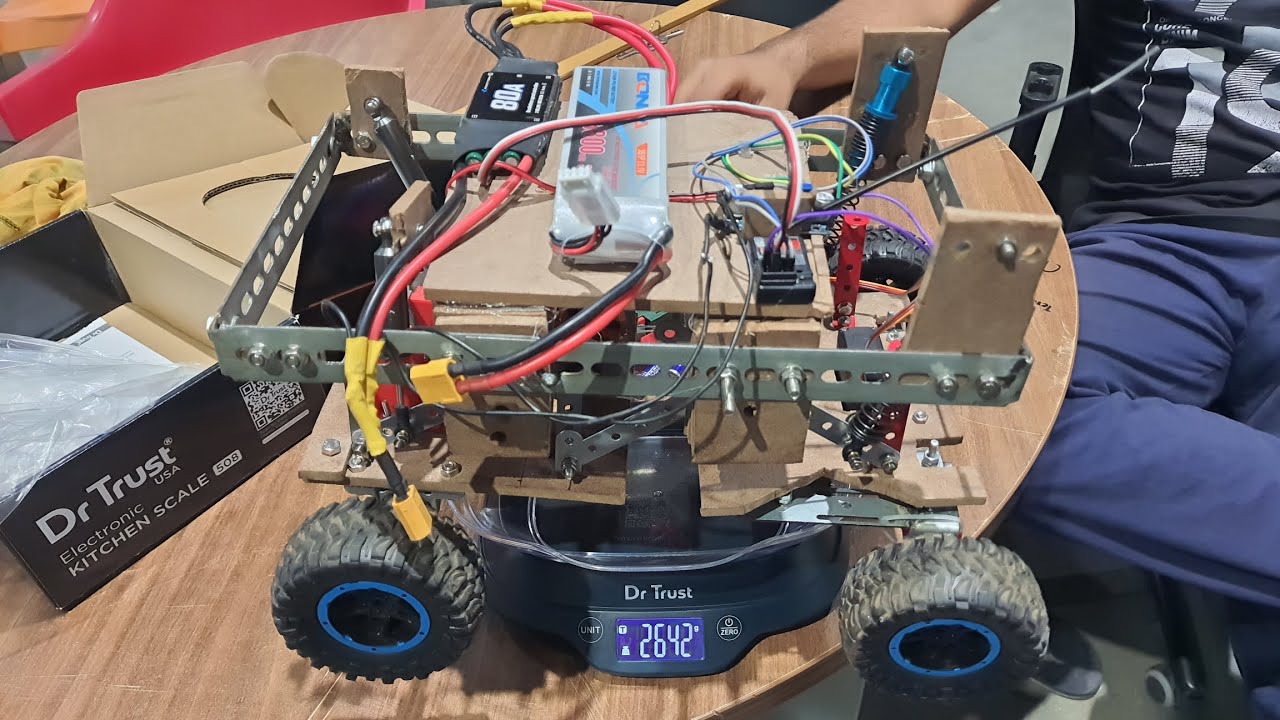
We made an RC car for the event, RC-Escapade, conducted by the Robotics Club of our institute, Techmaniacs, under the techno-cultural fest, Tirutsava of IIT Tirupati. The major engineering constraint while making the car was the unavailability of professional RC race car components, a limited time of 15 days to design and construct the car and a limited budget of Rs.15000. Hence, every part of the car had to be indigenously built or had to be salvaged. This car used was throttled by a DYS D3548-4 1100kv BLDC Motor controlled by Readytosky 80A ESC 2-6S Brushless ESC Speed Controller controlled by the user via a Flysky FS-GT2 Transmitter via FS-GR3E Receiver. The motor was connected to the axle using a belt and pulley mechanism, which increased torque output due to a gear ratio of 1:3.75. The belt was always kept taut regardless of wear and tear by the auto tension mechanism designed and implemented by us. The car's steering used Ackerman steering made by us from metal plates, fasteners and plastic spacers powered by a TowerPro MG995 Plastic Gear Servo Motor with a torque of 12kg-cm. The body of the car was divided into three sections, two lower sections supported by two suspensions each connected to the main chassis, one housing the steering mechanism and the other housing the traction. The last section was the top section, connected directly to the metal chassis housing the electronics.